Here we will describe the stochastic Ensemble Kalman Filter. The state evolves discretely and the measurements are discrete in time. The code is in matlab_implementation/ensemble_stochastic of https://github.com/mannyray/KalmanFilter. The function header in enkf_stochastic.m is:
For those familiar with the Kalman filter and notation are familiar with the naming of the variables. However, to be extra sure it is always best to run help enfk_stochastic. We will break down an example below. The enkf only takes models that are state dependent and not 'time' dependent. The modification to make it 'time' dependent is simple and easy to do for contributing to the project.
Example 1
We will use the same model as in the DD-EKF tab. The example is located in matlab_implementation/ensemble_stochastic/examples/logistic2.m and first runs the code from matlab_implementation/discrete_discrete/examples/logistic.m to define system parameters and then runs the ensemble filter. Run matlab_implementation/ensemble_stochastic/examples/logistic2.m:
Now plot the results
Example 2
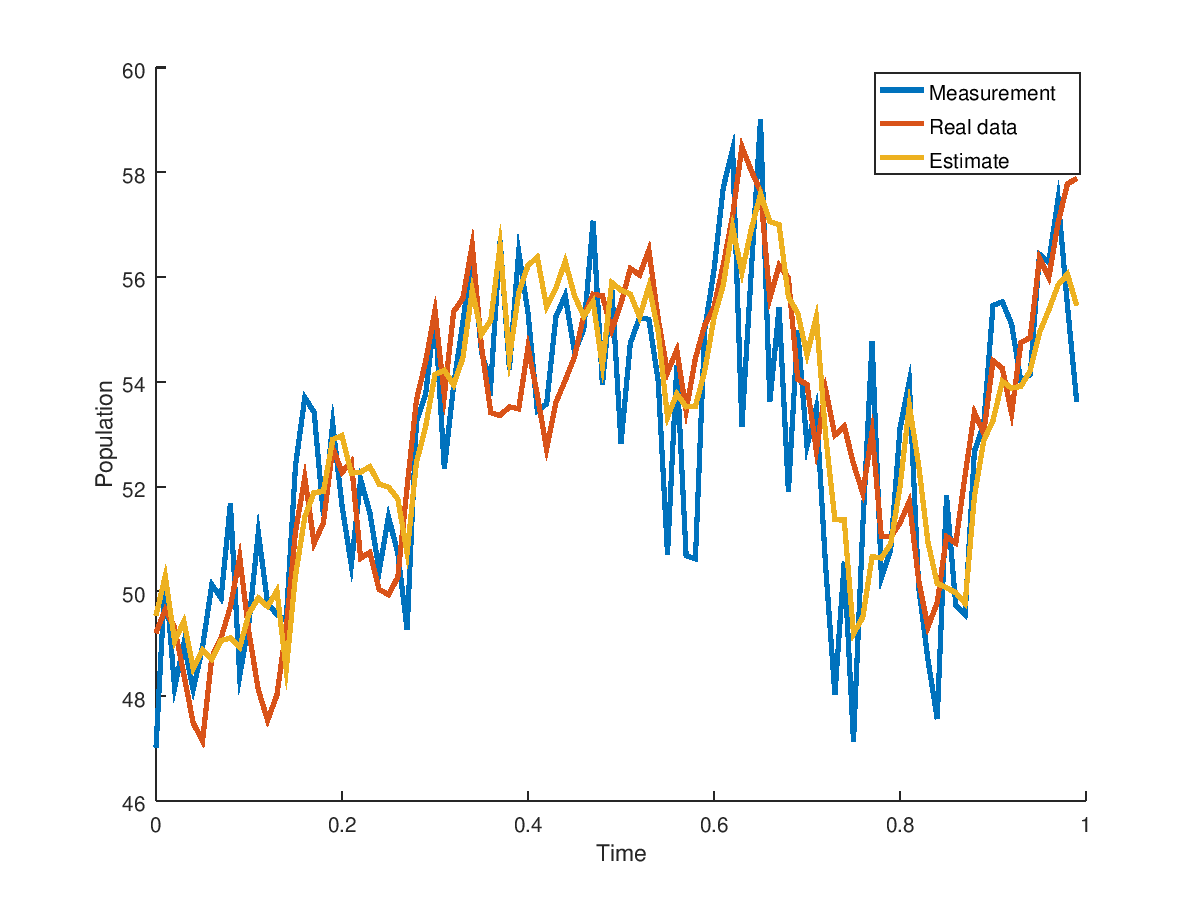
We will run Example 2 from DD-EKF tab in matlab_implementation/discrete_discrete/examples/linear.m for the enkf_stochastic filter in matlab_implementation/ensemble_stochastic/examples/linear2.m:
to produce
The first is output by linear script and the second is the one computed by ensemble filter.
