Here we will describe the cubature Extended Kalman filter. The algorithm is similar to the UKF, but different. The algorithm is described here
Arasaratnam, Ienkaran, and Simon Haykin. "Cubature kalman filters." IEEE Transactions on automatic control 54.6 (2009): 1254-1269.
The state evolves discretely and the measurements are discrete in time. The code is in matlab_implementation/cubature of https://github.com/mannyray/KalmanFilter. The function header in cubature.m is:
For those familiar with the Kalman filter and notation are familiar with the naming of the variables. However, to be extra sure it is always best to run help cubature. We will break down an example below.
Example 1
We will use the same model as in the DD-EKF tab - discrete logistic growth model with discrete measurements. The example is located in matlab_implementation/unscented/examples/logistic2.m and first runs the code from matlab_implementation/discrete_discrete/examples/logistic.m to define system parameters and then runs the ukf. The ukf only takes models that are state dependent and not 'time' dependent - this is reflect in the example code. The modification to make the code 'time' dependent is simple and easy way for contributing to the project.
The error computed is 3.43968286702904e-06.
Example 2
We will run Example 2 from DD-EKF tab in matlab_implementation/discrete_discrete/examples/linear.m for the cubature in matlab_implementation/cubature/examples/linear2.m:
to produce
Example 3
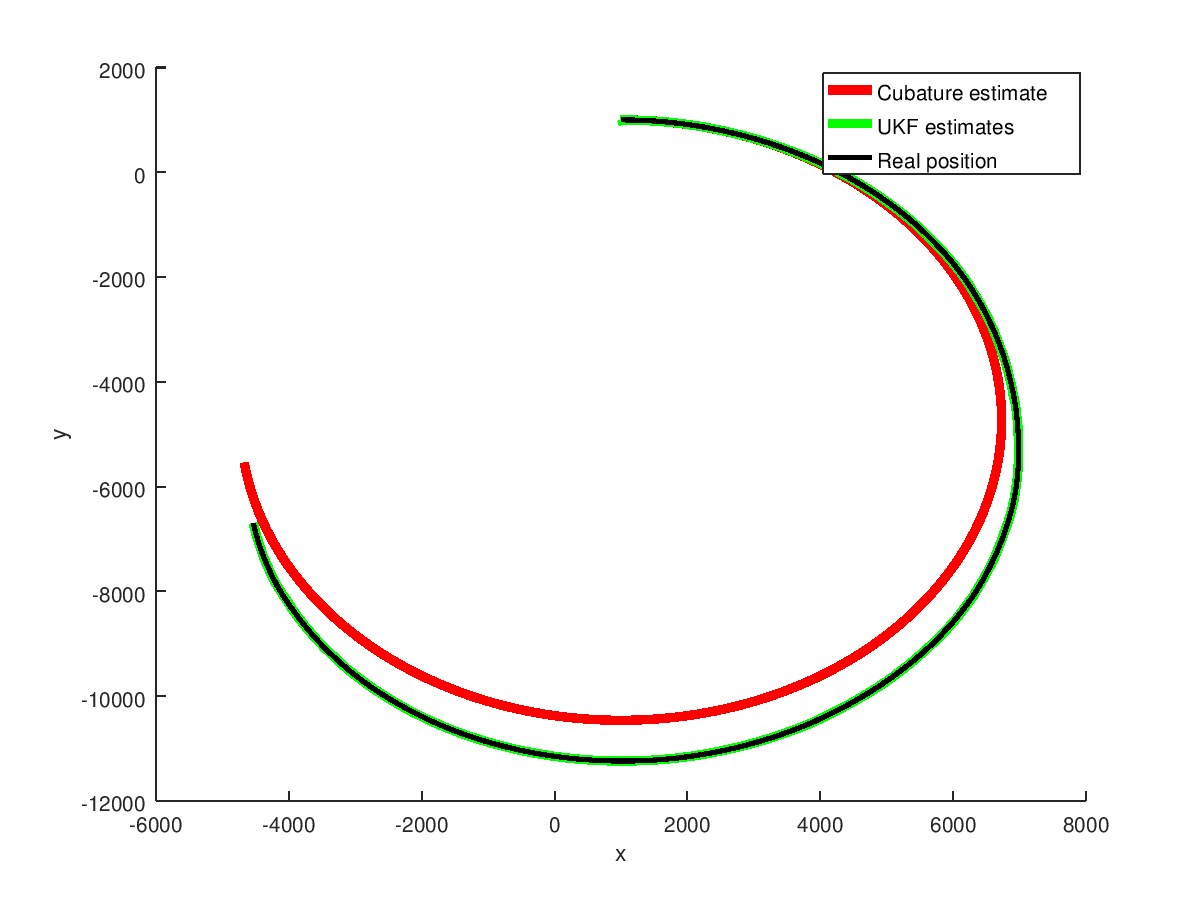
In this example we use the target tracking example from the cubature paper
Arasaratnam, Ienkaran, and Simon Haykin. "Cubature kalman filters." IEEE Transactions on automatic control 54.6 (2009): 1254-1269.
and use it to compare the UKF and cubature. In the original paper, the example was only done for the square root variant of cubature - here it we do it for both filters with non square root variant.
We will in the figure below the estimate of the cubature diverges: